

Jako dítě jsem rád sledoval kreslené filmy s auty, která jako by řídila sama sebe. Přimělo mě to přemýšlet, jestli taková auta mohou být skutečná a jestli je uvnitř magicky řídí malí roboti.
Jak stárneme, samořídící auta se stávají skutečnými! Jsem jimi upřímně fascinován. Rozumí například tomu, kdy zastavit na stopkách a na semaforech? Mohou vůbec vidět zvířata a lidi, kteří se procházejí po silnici? A jak je to s řízením, když je venku tma nebo když je deštivé nebo sněžné počasí?

Pojďme se bavit o samořídících autech! Jsou to auta, která se umí sama řídit bez lidského řidiče. Společnosti jako Tesla a Waymo používají chytré počítačové techniky, jako je hluboké učení, aby tato auta byla super chytrá. Hluboké učení pomáhá autům dělat skvělé věci, jako je porozumění dopravním značkám a bezpečné řízení, i když je počasí hrozné. Je to všechno o používání pokročilých technologií k utváření toho, jak se budeme v budoucnu pohybovat!
Table of Contents
Dějiny
Historie samořiditelných automobilů je podobná dlouhému, vzrušujícímu dobrodružství. Představte si 20. léta, kdy byla autonomní vozidla pro lidi stále jen snem. Jedna vynalézavá mysl, Francis Houdina, vynikla tím, že vytvořila auto, které sledovalo čáry na silnici. K jejímu vedení však potřebovalo speciální skryté dráty pod silnicí.
 Zdroj: theatlantic.com
Zdroj: theatlantic.com
Přesuneme-li se vpřed do 80. a 90. let, brilantní mozky na Carnegie Mellon University byly na něčem velkém. Vyvinuli auta, která by mohla „vidět“ pomocí kamer, což jim pomohlo procházet rušnými ulicemi města. Tato auta byla jako učení průzkumníků, kteří objevovali, jak řídit tím, že se rozhlížejí kolem sebe.
Pak přišel významný okamžik v roce 2004, odehrávající se na pozadí pouštní výzvy. Na scénu vstoupila samořídící auta, která se pokusila o těžký závod – závod, který nevyhráli, ale byl to začátek. Berte to jako jejich cvičiště, jak se stát lepšími řidiči.
Skutečný průlom však nastal v letech 2000 a 2010, kdy velké společnosti jako Tesla, Uber a Google (nyní Waymo) vstoupily do automobilového sektoru. Google začal testovat samořídící auta v roce 2009. Rychle vpřed do roku 2015 zavedly vozy Tesly funkci, díky níž se mohly částečně samy řídit po určitých silnicích. Zvládli řízení a pobyt na silnici bez neustálé lidské kontroly.
Jak se do závodu zapojilo více společností, soutěž o vytvoření zcela samořídících vozů se rozhořela. Představte si týmy vynálezců závodící ve výrobě aut, která by mohla řídit, aniž by k řízení potřebovali lidi.
Ale příběh pokračuje. Stále pracujeme na výrobě aut, která umí jezdit sama, což by změnilo způsob cestování. Toto dobrodružství se stále odehrává a znamená to, že bychom mohli mít bezpečnější a jednodušší cesty, protože tato luxusní samořídící auta jsou stále lepší.
Jak fungují samořídící auta?
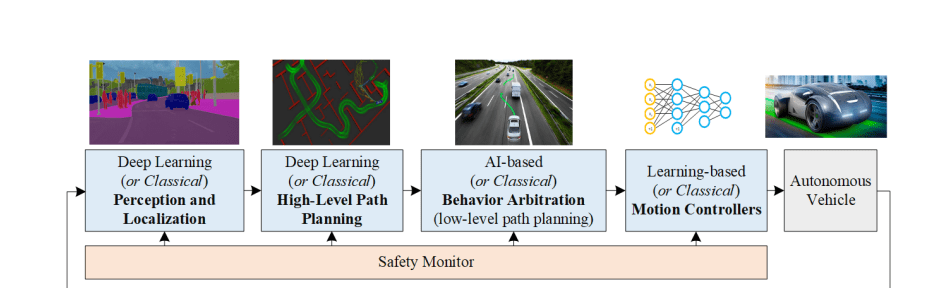
Samořídící auta jsou jako super chytrá rozhodnutí! Ke sběru dat o svém okolí používají kamery, LiDAR, RADAR, GPS a senzory setrvačnosti. Poté speciální algoritmy nazývané algoritmy hlubokého učení zpracují tato data, aby pochopili, co se kolem nich děje. Na základě tohoto porozumění dělají důležitá rozhodnutí pro bezpečnou a hladkou jízdu.
 Zdroj: arxiv.org
Zdroj: arxiv.org
Pokud chceme přijít na to, jak samořiditelná auta skutečně fungují, podívejme se blíže na tyto čtyři části zobrazené na výše uvedeném schématu. Je to jako řešení hádanky – pochopení každého dílku nám pomůže vidět větší obrázek toho, jak tato úžasná auta fungují:
- Vnímání
- Lokalizace
- Předpověď
- Rozhodování
- Plánování cest na vysoké úrovni
- Rozhodčí řízení o chování
- Pohybový ovladač
Vnímání
#1. Fotoaparát
Kamery jsou jako oči samořídícího auta – jsou velmi důležité! Pomáhají autu vědět, co se kolem něj děje. Tyto kamery dělají různé úkoly, například zjišťují, co jsou věci, oddělují různé části a zjišťují, kde se auto nachází.
Aby vozu nic neuniklo, má kamery umístěné po celém těle – vpředu, vzadu, vlevo a vpravo. Tyto kamery spolupracují na vytvoření velkého obrazu všeho kolem vozu. Je to jako vlastní speciální 360stupňový pohled!

Tyto kamery nejsou jen pro parádu. Jsou chytří. Některé se dívají daleko, až 200 metrů, takže auto ví, co se před ním chystá. Jiní se zaměřují na věci v okolí, takže auto může věnovat velkou pozornost detailům. Tento kamerový tým pomáhá autu vidět a rozumět všemu, jako když ho vede přítel, takže může řídit bezpečně a správně se rozhodovat.
Někdy jsou kamery super užitečné, například při parkování, protože ukazují široký záběr a pomáhají při správném rozhodování pro opatrnou jízdu.
Ale pouze používání kamer k vidění věcí má problémy, zejména v drsném počasí, jako je mlha, hustý déšť a v noci. V této době mohou snímky z fotoaparátů vypadat divně a chaoticky, což může být opravdu nebezpečné.
Abychom zvládli tyto náročné situace, potřebujeme speciální senzory, které mohou fungovat, když je opravdu tma nebo dokonce úplná noc. Měli by být také schopni měřit, jak daleko jsou věci, aniž by potřebovali světlo, které vidíme. Když dáme tyto senzory do očí auta (systém vnímání), auto se zlepší v jízdě za špatného počasí nebo když je špatně vidět. Takže auto může jezdit bezpečněji, což je skvělé pro každého, kdo jezdí na silnici.
#2. LiDAR
LiDAR, což znamená Light Detection And Ranging, je luxusní technologie, která využívá lasery ke zjištění, jak daleko jsou věci. LiDAR vysílá laserové paprsky a měří, jak dlouho trvá, než se z věcí vrátí.

Když LiDAR a kamery spolupracují, pomáhají vozu pochopit věci jasněji. Vytváří 3D mapu toho, co je kolem auta. Na tyto speciální informace se pak mohou podívat chytré počítačové programy, které autu pomohou odhadnout, co by mohla dělat jiná auta. To je užitečné, když je silnice složitá, například na rušných přechodech, protože auto může sledovat ostatní auta a bezpečně řídit.
LiDAR má však omezení, která mohou být problematická. I když funguje dobře v noci a v tmavém prostředí, může bojovat v podmínkách s rušením deštěm nebo mlhou, což může vést k nepřesnostem ve vnímání. K vyřešení těchto problémů používáme současně LiDAR i RADAR senzory. Tyto senzory poskytují další informace, které vozu pomáhají lépe porozumět věcem. Auto může jezdit samo o sobě bezpečněji a lépe.
#3. RADAR
RADAR, což je zkratka pro Radio Detection and Ranging, se již dlouhou dobu používá v každodenních věcech a také v armádě. RADAR, původně používaný armádou k detekci objektů, počítá vzdálenosti pomocí signálů rádiových vln. V dnešní době je RADAR nezbytný v mnoha autech, zejména těch samořiditelných.
RADAR je úžasný, protože může fungovat za každého počasí a světla. Místo laserů používá rádiové vlny, díky čemuž je flexibilní a super užitečný. RADAR je však považován za hlučný senzor, což znamená, že dokáže detekovat překážky, i když kamera žádné nevidí.
Mozek samořídícího auta se může zmást všemi dalšími signály z RADARu, které nazýváme „hluk“. Aby se to napravilo, auto potřebuje vyčistit informace z RADARu, aby se mohlo dobře rozhodovat.
Čištění dat znamená použití speciálních triků k odlišení silných signálů od slabých, jako je oddělení důležitých věcí od ne tak důležitých věcí. Auto používá chytrý trik zvaný Rychlé Fourierovy transformace (FFT), aby informacím ještě lépe porozuměl.
RADAR a LiDAR poskytují informace o jednotlivých bodech, jako jsou tečky na papíře. Pro lepší pochopení těchto teček auto používá něco jako seskupování. Je to, jako když dáte podobné věci dohromady. Auto používá chytré statistické metody, jako je Euclidean Clustering nebo K-means Clustering, ke kombinaci podobných teček a jejich pochopení. Díky tomu je vůz schopen řídit chytřeji a bezpečněji.
Lokalizace
U samořídících automobilů hrají klíčovou roli při určování polohy a orientace vozidla při jeho navigaci lokalizační algoritmy, známé jako vizuální odometrie (VO). Funkce VO identifikuje a porovnává klíčové body v po sobě jdoucích snímcích videa.
Auto se dívá na speciální tečky v informacích, jako jsou značky na mapě. Poté vůz pomocí statistik zvaných SLAM zjistí, kde se věci nacházejí a jak se pohybují. To pomáhá vozu vědět, co je kolem, jako jsou silnice a lidé.

A aby to bylo ještě lepší, auto používá něco, čemu se říká hluboké učení. Je to jako super-chytrý počítač.
Díky těmto trikům dokáže auto velmi dobře rozumět věcem. Neuronové sítě jako PoseNet a VLocNet++ využívají bodová data k odhadu 3D polohy a orientace objektů. Tyto odhadované 3D polohy a orientace lze poté využít k odvození sémantiky scény, jak je ukázáno na obrázku níže. Když auto používá matematické a chytré počítačové triky, ví, kde je a co je kolem něj. To pomáhá vozu bezpečně a plynule jezdit samostatně.
Předpověď
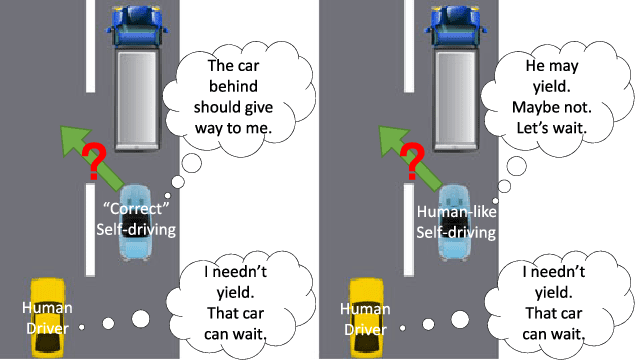
Pochopení lidských řidičů je skutečně složitý úkol, protože zahrnuje emoce a reakce spíše než přímou logiku. Protože nevíme, co udělají ostatní řidiči, je pro samořídící auta klíčové dobře odhadnout své jednání. To pomáhá zajistit bezpečnost na silnici.
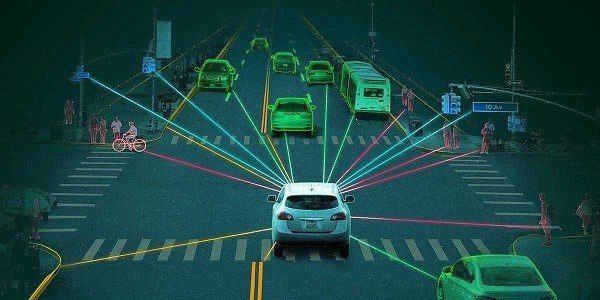
Představte si, že samořídící auta mají oči všude kolem, jako 360stupňový výhled. To jim umožňuje vidět vše, co se děje. Používají tyto informace s hlubokým učením. Vůz využívá chytré techniky k předvídání toho, co by mohli udělat ostatní řidiči. Je to podobné, jako když hrajete hru, ve které plánujete dopředu, jak se vám povede.
 Predikce pomocí hlubokého učení
Predikce pomocí hlubokého učení
Speciální senzory v samořídících autech jsou jako jejich oči. Pomáhají autům vědět, jaké věci jsou na obrázcích, nacházet věci kolem sebe, vědět, kde jsou, a vidět, kde věci končí. To pomáhá autu zjistit, co je v okolí, a dělat chytrá rozhodnutí.
Během školení algoritmy hlubokého učení modelují komplexní informace z obrázků a datových bodů cloudu získaných z LiDARů a RADARů. Během skutečné jízdy (inference) stejný model pomáhá vozu připravit se na možné pohyby, včetně brzdění, zastavení, zpomalení, změny jízdního pruhu a dalších.
Hluboké učení je jako chytrý pomocník do auta. Díky tomu vůz porozumí věcem, kterými si není jistý, zjistí jeho polohu a lépe řídí. Díky tomu je jízda bezpečná a jede plynuleji.
Složitější částí je však rozhodování o nejlepší akci z několika možností. Výběr správných pohybů vyžaduje pečlivé promyšlení, aby vůz mohl dobře řídit a zůstat v bezpečí.
Rozhodování
Samořídící auta musí dělat důležitá rozhodnutí v ošemetných situacích, ale není to snadné. Je to proto, že senzory nemusí být vždy správné a lidé na silnici mohou dělat neočekávané věci. Auto musí odhadnout, co udělají ostatní, a pohybovat se, aby se vyhnulo srážce.
Abyste si mohli vybrat, auto potřebuje spoustu informací. Auto shromažďuje tyto informace pomocí senzorů a poté pomocí algoritmů hlubokého učení rozumí, kde se věci nacházejí, a předvídá, co se může stát. Lokalizace pomáhá vozu znát jeho výchozí polohu, zatímco predikce generuje několik možných akcí na základě prostředí.
Otázkou však zůstává: jak si auto vybere nejlepší akci z mnoha předpovídaných?
 Zdroj: semanticscholar.org
Zdroj: semanticscholar.org
Deep Reinforcement Learning (DRL) je technika pro rozhodování a používá algoritmus zvaný Markovův rozhodovací proces (MDP). MDP je užitečné při odhadování toho, jak by se lidé na silnici mohli v budoucnu chovat. Když se pohybuje více věcí, věci se komplikují. To znamená, že samořídící auto musí přemýšlet o ještě více možných akcích.
Model hlubokého učení je optimalizován pomocí bayesovské optimalizace, aby se vypořádal s výzvou najít nejlepší tah pro vůz. V některých případech se pro rozhodování používá rámec kombinující skrytý Markovův model a Bayesiánskou optimalizaci, který umožňuje samořiditelnému vozu efektivně a bezpečně navigovat v různých složitých scénářích.
 Zdroj: arxiv.org
Zdroj: arxiv.org
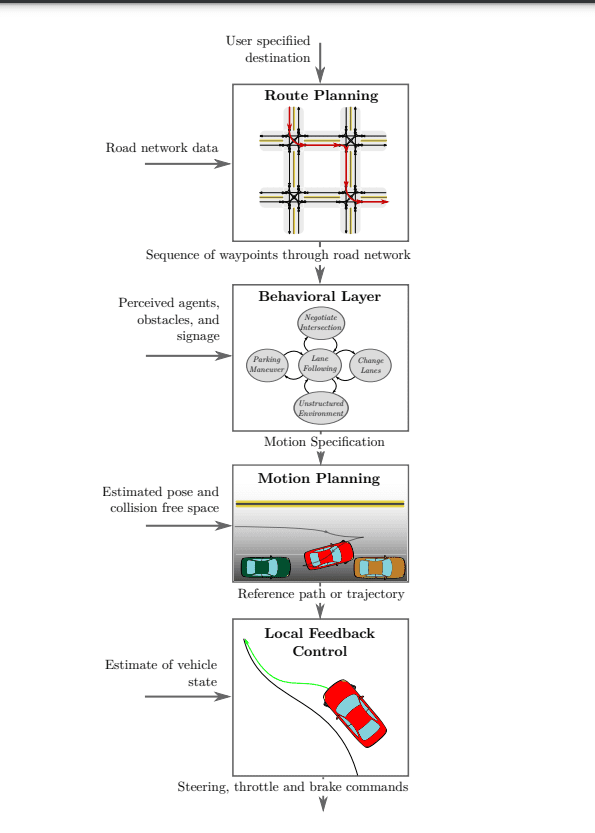
Rozhodování v samořídících automobilech probíhá podle hierarchického procesu se čtyřmi klíčovými komponenty:
Plánování cesty nebo trasy: Na začátku cesty auto určí nejlepší trasu ze své aktuální polohy do požadovaného cíle. Cílem je najít optimální řešení mezi různými možnými cestami.
Chování Arbitráž: Vůz musí řídit trasu poté, co ji naplánuje. Auto si je vědomo statických objektů, jako jsou silnice a křižovatky, ale není schopno předvídat přesné jednání ostatních řidičů. Abychom tuto nejistotu zvládli, používáme pro plánování chytré metody, jako jsou Markovovo rozhodovací procesy (MDP).
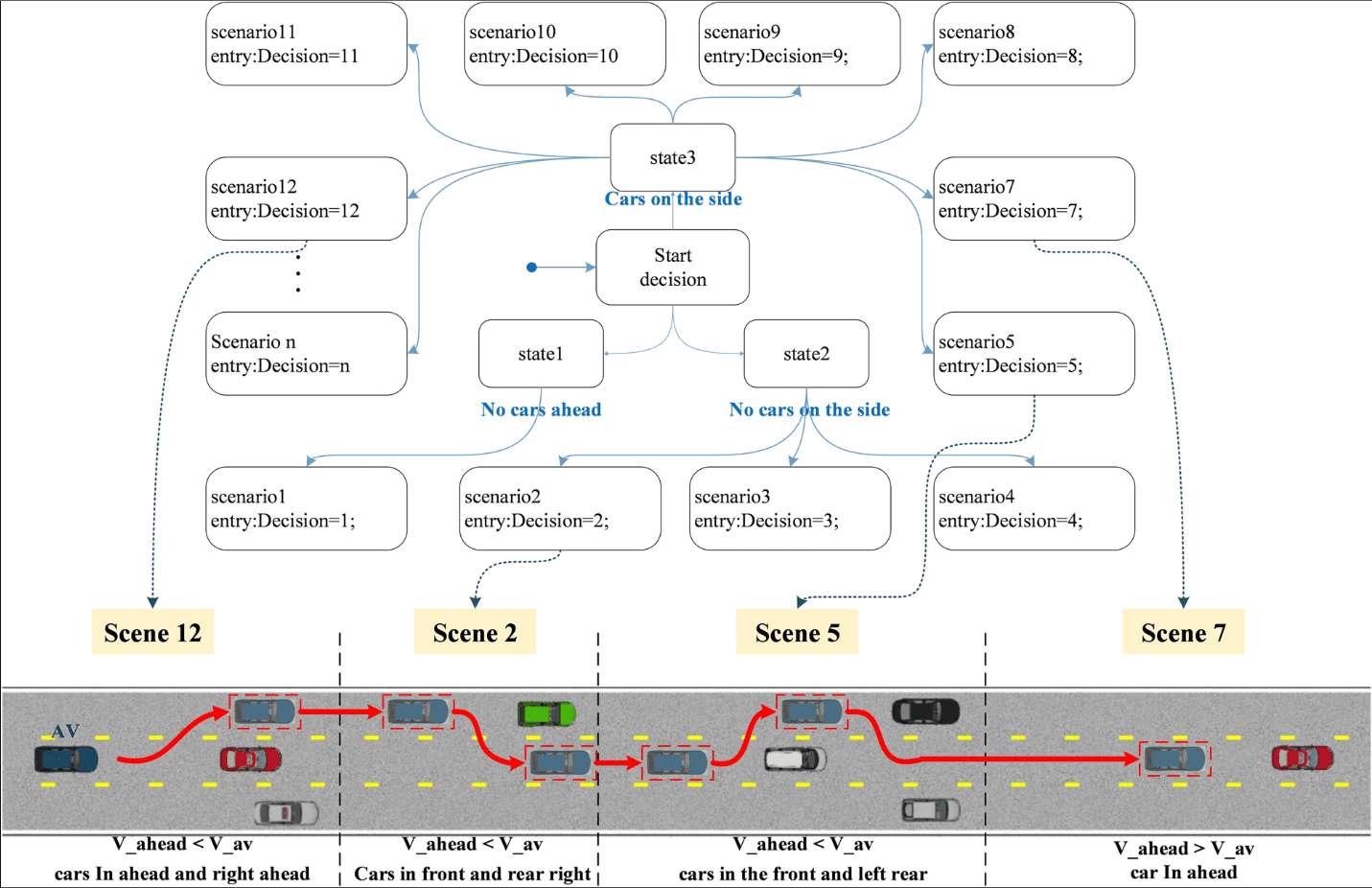 Rozhodnutí o scénáři top státního automatu
Rozhodnutí o scénáři top státního automatu
Plánování pohybu: S plánovanou trasou a vrstvou chování, která určuje, jak po ní navigovat, systém plánování pohybu koordinuje pohyby vozu. To znamená zajistit, aby se vůz pohyboval způsobem, který je bezpečný a pohodlný pro lidi uvnitř. Přemýšlí o věcech, jako je rychlost jízdy, změna jízdního pruhu a co je kolem ní.
Řízení vozidla: Posledním krokem je řízení vozidla, které provádí referenční dráhu generovanou systémem plánování pohybu, čímž zajišťuje, že vůz hladce a bezpečně sleduje zamýšlenou trajektorii.
Rozdělením rozhodování na tyto různé části mohou samořiditelná auta dobře a bezpečně jezdit na komplikovaných místech. To zajišťuje cestujícím hladkou a pohodlnou jízdu.
Konvoluční neuronové sítě
Konvoluční neuronové sítě (CNN) jsou široce používány v samořídících automobilech kvůli jejich schopnosti modelovat prostorové informace, zejména obrázky. CNN vynikají v extrahování funkcí z obrázků, díky čemuž jsou užitečné pro zjišťování mnoha různých věcí.
V CNN, jak se hloubka sítě zvyšuje, různé vrstvy zachycují různé vzory. První vrstvy detekují jednoduché prvky, jako jsou hrany, zatímco hlubší vrstvy rozpoznávají ty složitější, jako jsou tvary objektů (jako listy na stromech nebo pneumatiky na vozidlech). Tato přizpůsobivost je důvodem, proč jsou CNN centrálním algoritmem v samořídících autech.
Základní složkou CNN je konvoluční vrstva, která využívá konvoluční jádro (filtrační matici) ke zpracování místních oblastí vstupního obrazu.
Filtrační matice se během tréninku aktualizuje, aby se získaly smysluplné váhy. Základní vlastností CNN je sdílení hmotnosti, kde se stejné parametry hmotnosti používají k reprezentaci různých transformací, což šetří prostor pro zpracování a umožňuje různé reprezentace prvků.
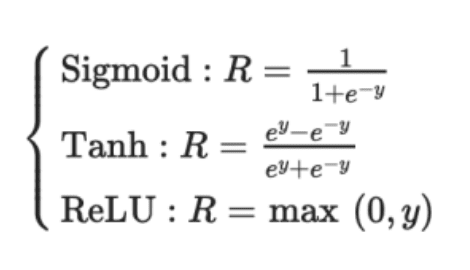
Výstup konvoluční vrstvy obvykle prochází nelineární aktivační funkcí, jako je Sigmoid, Tanh nebo ReLU. ReLU je preferován, protože konverguje rychleji než ostatní. Výsledek také často prochází vrstvou maximálního sdružování. To zachová důležité detaily z obrázku, jako je pozadí a textury.
Tři základní vlastnosti CNN z nich činí všestranné a základní v samořídících automobilech:
- Místní přijímací pole
- Sdílené váhy
- Prostorové vzorkování
Tyto vlastnosti omezují nadměrné přizpůsobení a ukládají kritické reprezentace a funkce klíčové pro klasifikaci obrazu, segmentaci, lokalizaci a další.
Zde jsou dvě sítě CNN používané společnostmi, které jsou průkopníky samořídících vozů:
- HydraNet od společnosti Tesla
- ChauffeurNet od Google Waymo
Zjistěte více o konvolučních neuronových sítích.
#1. HydraNet od společnosti Tesla
HydraNet je dynamická architektura představená Ravim a kol. v roce 2018, primárně vyvinutý pro sémantickou segmentaci u samořídících vozů. Jeho hlavním cílem je zlepšit výpočetní efektivitu během inference.
Koncept HydraNet zahrnuje různé sítě CNN, nazývané pobočky, přiřazené ke konkrétním úkolům. Každá větev přijímá různé vstupy a síť si může selektivně vybrat, které větve se mají spustit během inference, a nakonec agregovat výstupy z různých větví a učinit konečné rozhodnutí.
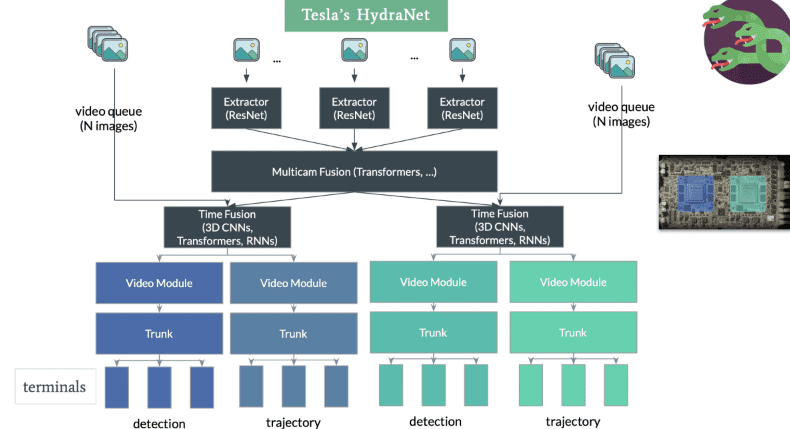
V kontextu samořiditelných aut mohou vstupy představovat různé aspekty prostředí, jako jsou statické objekty (stromy a silniční zábradlí), silnice a jízdní pruhy, semafory atd. Tyto vstupy jsou trénovány v samostatných větvích. Během inference se hradlový mechanismus rozhodne, které větve aktivovat, a slučovač shromažďuje jejich výstupy, aby učinil konečné rozhodnutí.
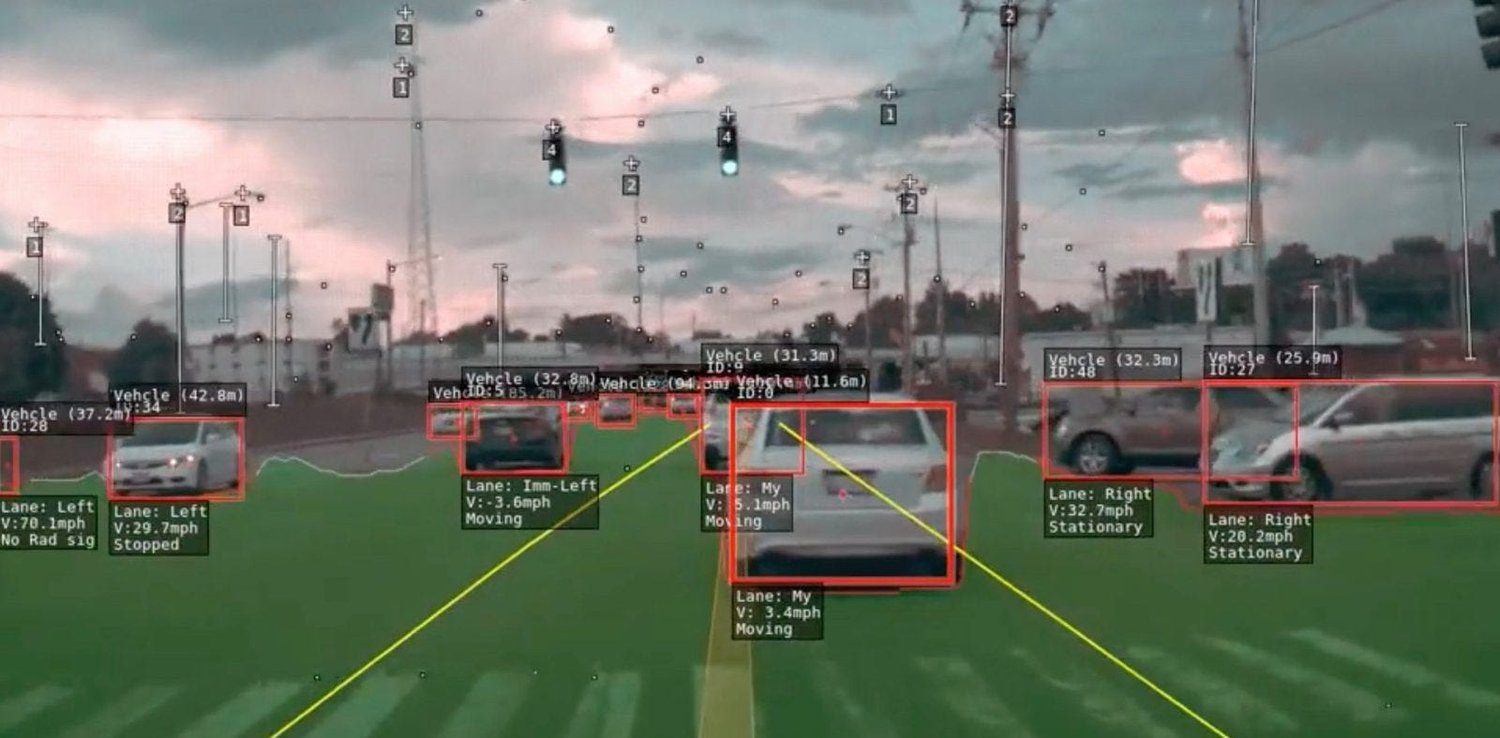 Detekce rychlosti, jízdních pruhů a pohybu
Detekce rychlosti, jízdních pruhů a pohybu
Tesla upravila architekturu HydraNet, která zahrnuje sdílenou páteř, aby řešila problémy při segregaci dat pro jednotlivé úkoly během inference. Sdílená páteř, obvykle upravené bloky ResNet-50, umožňuje trénovat síť na datech všech objektů. Hlavy specifické pro úlohy založené na architektuře sémantické segmentace, jako je U-Net, umožňují modelu předpovídat výstupy specifické pro každou úlohu.

Tesla HydraNet vyniká svou schopností promítat pohled z ptačí perspektivy a vytvářet 3D reprezentaci prostředí z jakéhokoli úhlu. Tato vylepšená rozměrnost pomáhá vozu v lepší navigaci. Je pozoruhodné, že Tesla toho dosahuje bez použití senzorů LiDAR. Místo toho se spoléhá pouze na dva senzory: kameru a radar. Efektivita Tesly HydraNet umožňuje zpracovávat informace z osmi kamer a generovat hloubkové vnímání, což demonstruje působivé schopnosti bez potřeby další technologie LiDAR.
#2. ChauffeurNet od Google Waymo
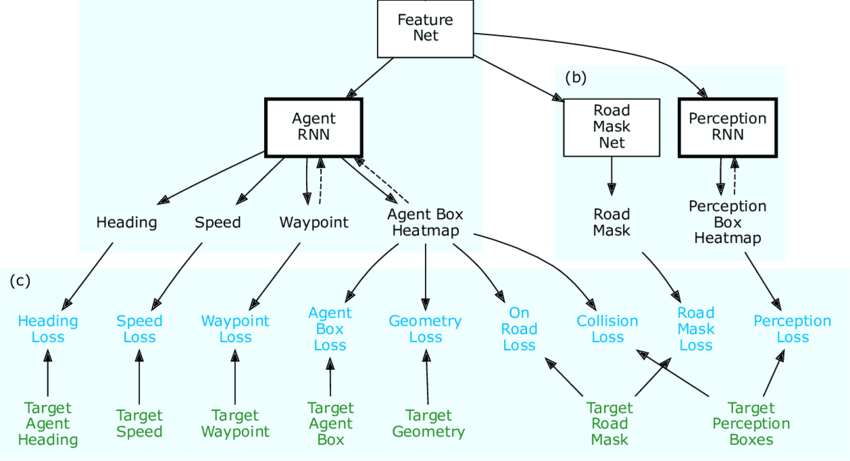
ChauffeurNet je neuronová síť založená na RNN, kterou používá Google Waymo k tréninku samořídících aut pomocí imitačního učení. I když primárně spoléhá na RNN pro generování jízdních trajektorií, obsahuje také komponentu CNN známou jako FeatureNet.
Tato síť konvolučních prvků extrahuje reprezentace kontextových prvků sdílené jinými sítěmi a používá se k extrahování prvků z percepčního systému.
 Zdroj: Researchgate
Zdroj: Researchgate
Koncepcí ChauffeurNet je trénovat samořídící auto napodobováním zkušených řidičů pomocí imitačního učení. Aby autoři článku „ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst“ zavedli syntetická data, aby překonali omezení nedostatku reálných tréninkových dat.
Tato syntetická data zavádějí různé odchylky, jako je narušení trajektorie, přidávání překážek a vytváření nepřirozených scén. Bylo zjištěno, že trénování vozu pomocí syntetických dat je efektivnější než použití pouze skutečných dat.
V ChauffeurNet není systém vnímání součástí end-to-end procesu, ale funguje jako systém střední úrovně. To umožňuje, aby síť měla různé vstupní variace ze systému vnímání. Síť sleduje střední úroveň reprezentace scény ze senzorů a pomocí tohoto vstupu spolu se syntetickými daty napodobuje chování experta při řízení.
Vyloučením úkolu vnímání a vytvořením vysoce kvalitního pohledu na prostředí z ptačí perspektivy usnadňuje ChauffeurNet snazší učení přenosu a umožňuje síti činit lepší rozhodnutí na základě skutečných i simulovaných dat. Síť generuje trajektorie jízdy tím, že iterativně předpovídá postupné body v dráze jízdy na základě reprezentací střední úrovně. Tento přístup se ukázal jako příslib v efektivnějším výcviku samořídících vozů, který poskytuje cestu k bezpečnějším a spolehlivějším systémům autonomního řízení.
#3. Částečně pozorovatelný Markovův rozhodovací proces používaný pro samořídící auta
Částečně pozorovatelný Markovův rozhodovací proces (POMDP) je matematický rámec používaný v kontextu samořídících automobilů k rozhodování za nejistoty. V reálných scénářích mají samořiditelná auta často omezené informace o svém prostředí kvůli šumu senzorů, okluzím nebo nedokonalým systémům vnímání. POMDP je navržen tak, aby zvládl takovou částečnou pozorovatelnost a činil optimální rozhodnutí na základě zvážení nejistoty i dostupných pozorování.
V POMDP působí rozhodovací agent v prostředí s částečně pozorovatelnými stavy. Agent zahájí akci a prostředí pravděpodobně přechází do nových stavů. Agent však dostává pouze dílčí pozorování nebo hlučné informace o skutečném stavu prostředí. Cílem je najít politiku, která maximalizuje očekávanou kumulativní odměnu v průběhu času při zohlednění nejistoty v prostředí a pozorování agenta.
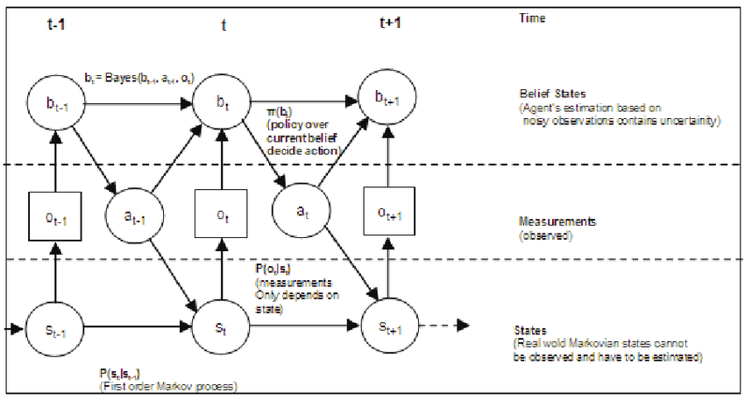 Zdroj: Researchgate
Zdroj: Researchgate
V kontextu samořídících vozů je POMDP zvláště užitečný pro úkoly, jako je plánování pohybu, predikce trajektorie a interakce s ostatními účastníky silničního provozu. Samořídící vůz může používat POMDP k rozhodování o změnách jízdních pruhů, úpravách rychlosti a interakci s chodci a jinými vozidly s ohledem na nejistotu v okolním prostředí.
POMDP má šest komponent a lze jej označit jako POMDP
M:= (I, S, A, R, P, γ)
kde,
I: Pozorování
S: Konečná množina stavů
A: Konečná množina akcí
R: Funkce odměn
P: Přechodová pravděpodobnostní funkce
γ: diskontní faktor pro budoucí odměny.
POMDP mohou být výpočetně náročné, protože je třeba zvážit více možných stavů a pozorování. Pokročilé algoritmy, jako je plánování prostoru víry a metody Monte Carlo, se však často používají k efektivní aproximaci optimální politiky a umožnění rozhodování v reálném čase v samořídících automobilech.
Začleněním POMDP do svých rozhodovacích algoritmů mohou samořiditelná auta efektivněji a bezpečněji procházet složitým a nejistým prostředím, zohledňovat nejistotu v odečítáních senzorů a činit informovaná rozhodnutí k dosažení zamýšlených cílů.
Samořídící automobil, fungující jako agent, se učí interakcí s prostředím pomocí posilovacího učení (RL), což je druh strojového učení. Stav, akce a odměna jsou tři důležité proměnné v jádru Deep Reinforcement Learning (DRL).
Stav: Popisuje aktuální situaci samořiditelného vozu v daném čase, například jeho polohu na silnici.
Akce: Představuje všechny možné pohyby, které může vůz provést, včetně rozhodnutí, jako je změna jízdního pruhu nebo úprava rychlosti.
Odměna: Poskytuje vozu zpětnou vazbu, kdykoli provede určitou akci. Odměna může být pozitivní nebo negativní a cílem DRL je maximalizovat kumulativní odměny.
Na rozdíl od učení pod dohledem, kde jsou algoritmu výslovně zadány správné akce, se DRL učí zkoumáním prostředí a získáváním odměn na základě svých akcí. Neuronová síť samořídícího auta je trénována na datech vnímání, která zahrnují vlastnosti extrahované konvolučními neuronovými sítěmi (CNN).
Algoritmy DRL jsou pak trénovány na těchto reprezentacích, což jsou nižší dimenzionální transformace vstupu, což vede k efektivnějšímu rozhodování během inference.
Trénink samořídících aut v reálných scénářích je nebezpečný a nepraktický. Místo toho jsou cvičeni v simulátorech, kde nehrozí žádné riziko pro lidskou bezpečnost.
 Simulátor
Simulátor
Některé open-source simulátory jsou:
Kombinací údajů o vnímání s posilujícím učením se mohou samořídící auta naučit navigovat ve složitých prostředích, dělat bezpečná a optimální rozhodnutí a stát se zběhlejšími ve zvládání scénářů jízdy v reálném světě.
Nejčastější dotazy
Co jsou to autonomní vozidla?
Autonomní vozidla, běžně označovaná jako auta s vlastním řízením, jsou automobily s nejmodernějšími senzory a umělou inteligencí, které se mohou samy navigovat a řídit. Tato vozidla vyhodnocují své prostředí a rozhodují o řízení pomocí kamer, LiDAR, RADARu a sofistikovaných algoritmů.
Jsou autonomní vozidla bezpečná?
Při vývoji samořídících automobilů je bezpečnost na prvním místě. Aby bylo zajištěno, že splňují vysoké bezpečnostní předpisy, procházejí tato vozidla důkladným testováním a simulací. Přestože během testování došlo k incidentům, konečným cílem je učinit samořídící auta bezpečnější než auta řízená lidmi.
Lze autonomní vozidla používat za každého počasí?
Extrémní počasí, včetně silného deště nebo sněžení, by mohlo představovat problémy pro samořídící automobily. Nepříznivé počasí může snížit přesnost senzorů a zhoršit jízdní schopnosti. Inženýři se neustále snaží, aby technologie fungovala lépe za nepříznivých povětrnostních podmínek.
Autonomní vozidla – jsou povolena?
Zákonnost autonomních vozidel se liší podle národa a lokality. Aby se přizpůsobila autonomním vozidlům, mnoho jurisdikcí reviduje své zákony a předpisy. Testování samořídících vozů a omezené nasazení jsou již v některých oblastech povoleny.
Potřebují autonomní vozidla zásah člověka?
Většina aktuálně dostupných samořídících aut je na úrovni 2 nebo 3 automatizace, kde mohou někdy potřebovat pomoc člověka. Průmysl se však snaží dosáhnout vyšších úrovní automatizace, jako je úroveň 4 nebo úroveň 5, kde se lidský zásah stává minimálním nebo zbytečným.
Závěr
Závěrem lze říci, že samořídící auta mají schopnost transformovat automobilový průmysl zvýšením účinnosti a bezpečnosti silničního provozu. Podívali jsme se na všechny základní komponenty, které podporují tato autonomní auta, včetně LiDAR, RADAR, kamer a pokročilých algoritmů.
I když byl pokrok slibný, stále existují důležité úkoly, které je třeba řešit. V současnosti jsou samořídící auta na úrovni 2 z úrovně 5 pokročilosti, což v určitých scénářích vyžaduje lidský zásah. Díky pokračující oddanosti a inovacím se však přibližujeme k dosažení plné autonomie.
Klíčové věci
Pokročilé algoritmy: Další optimalizace algoritmů je zásadní pro zlepšení vnímání vozovky, zejména v náročných podmínkách, kde může chybět dopravní značení a značky.
Zdokonalení způsobu snímání: Zlepšení přesnosti a účinnosti způsobů snímání pro mapování a lokalizaci bude zásadní pro dosažení vyšší úrovně autonomie.
Komunikace mezi vozidly: Vytvoření propojeného a inteligentního silničního ekosystému bude možné díky sledování komunikace mezi vozidly.
Interakce člověka a stroje: Podpora veřejné přijatelnosti technologií s vlastním řízením bude vyžadovat prozkoumání a řešení problémů souvisejících s interakcí člověka a stroje.
Vyhlídky do budoucna: Navzdory obtížím jsou dosavadní úspěchy pozoruhodné a díky pokračující spolupráci a výzkumu nabízejí samořiditelná auta potenciál poskytnout bezpečnější a efektivnější dopravní prostředí pro každého.
Všichni jsme na stejné cestě ke zcela autonomním samořídícím autům. S tím, jak řešíme výzvy a podněcujeme inovace, se přibližujeme době, kdy vozidla hladce řídí naše vozovky a zlepšuje bezpečnost, životní prostředí a pohodlí pro každého.
Nyní se můžete dozvědět o prostorovém počítání a jeho aplikaci při vývoji samořídících automobilů.